


Medical Percussion Research
Research
Machine Learning
Robotics
Python
Matlab
- I co-authored a research project where we quantified medical percussion for the first time! We designed a percussion robotic device and collected data from silicon samples. We used wavelet transform and neural networks to analyse the data and build a predictive model.
Both presentation videos back to back.
A mathematical model was developed in MATLAB and was used to inform the design of a 3D printed percussion device, that could be programmed to percuss a silicon phantom.

MATLAB model and robotic device CAD
The force was measured using a load cell and compared to the force profile of a manual medical percussion.

Comparison of force profiles
A contact microphone was used to collect the acoustic response from several hundred percussion events. The audio samples were trimmed and de-noised with Matlab and Python scripts.

Experimental Setup
I assigned reference frames to each link of the robots arm using the Denavit-Hartenberg convention.
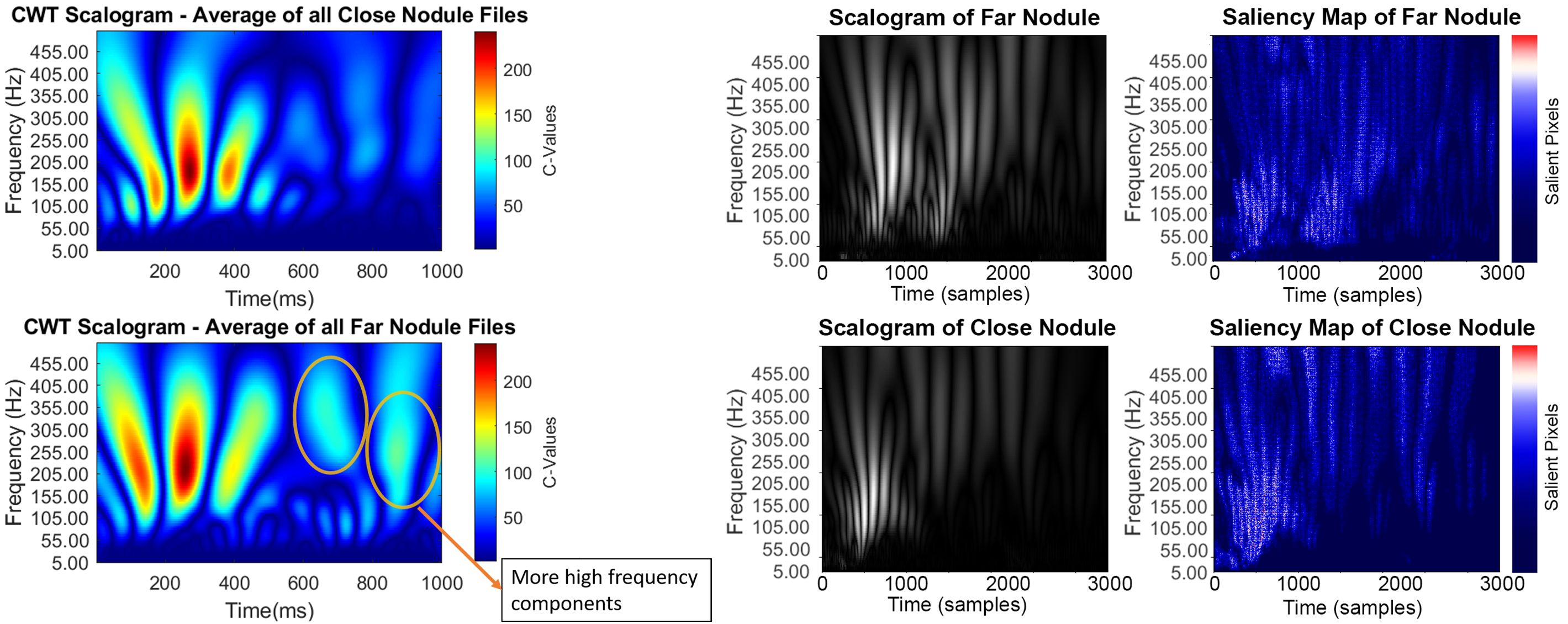
Scalograms and saliency maps
Scalograms were generated for each percussion event and these were used to train and validate a convolutional neural network. The CNN was able to classify the presence of a nodule accurately, and saliency maps were used to check which time-variant frequencies informed the neural networks classification.
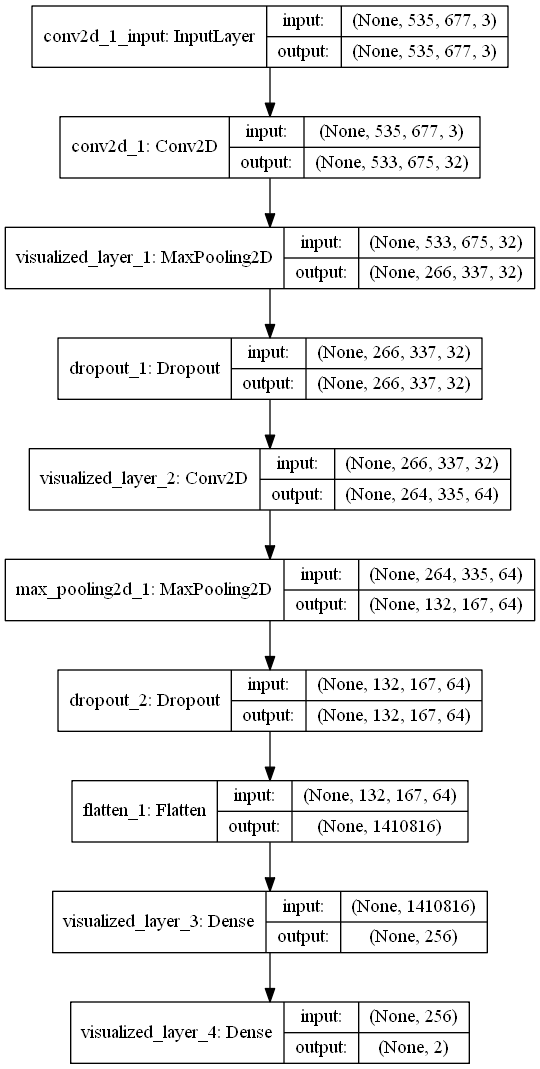
Neural network architecture
For more details about the project's code as well as our papers and posters, check out the project's github here.